
DISCOVER POLARIS
POLARIS is a 3-meter fully autonomous sailboat capable of collecting oceanic and atmospheric data in the Pacific Ocean. Integrating our technology with the fields of climate research and sustainability, we hope to study the environmental impacts affecting the health of the ocean both above and below the water’s surface.
Main Objectives
To utilize our technology to help improve ocean conservation advocacy.
To help monitor the health of the ocean.
To empower communities to take action in improving local sustainability.

Environmental Objectives
We want to improve the visibility of climate change among students at the university. By applying this technology to ocean research, we have the potential to provide more valuable insights into the climate crisis. To make the data more approachable for the general public, our project will have an interactive website allowing users to see exactly what data we are collecting and where it is being collected. Combining streams of engineering, science, academia, and the public, we will bring awareness to the implications of climate change on the environment.

Low Level Goals
The plan for this project is to send the boat out on multi-day operations in the Pacific Ocean. This will provide the opportunity to map out areas of the ocean before returning closer to land for retrieval. As well, we will be able to collect and repair any damages before sending it on more missions.
Despite being ~3m long, we are emphasizing reliability and durability on all systems of the project. We will launch the boat during the summer, allowing for the greatest opportunity for success (lots of sun and optimal weather conditions).
TECHNICAL OVERVIEW
Mechanical




-
The hull provides buoyancy and stability, allowing the sailboat to float and navigate through water efficiently. It also houses and protects essential components, such as the electronics, propulsion systems, and ballast.
-
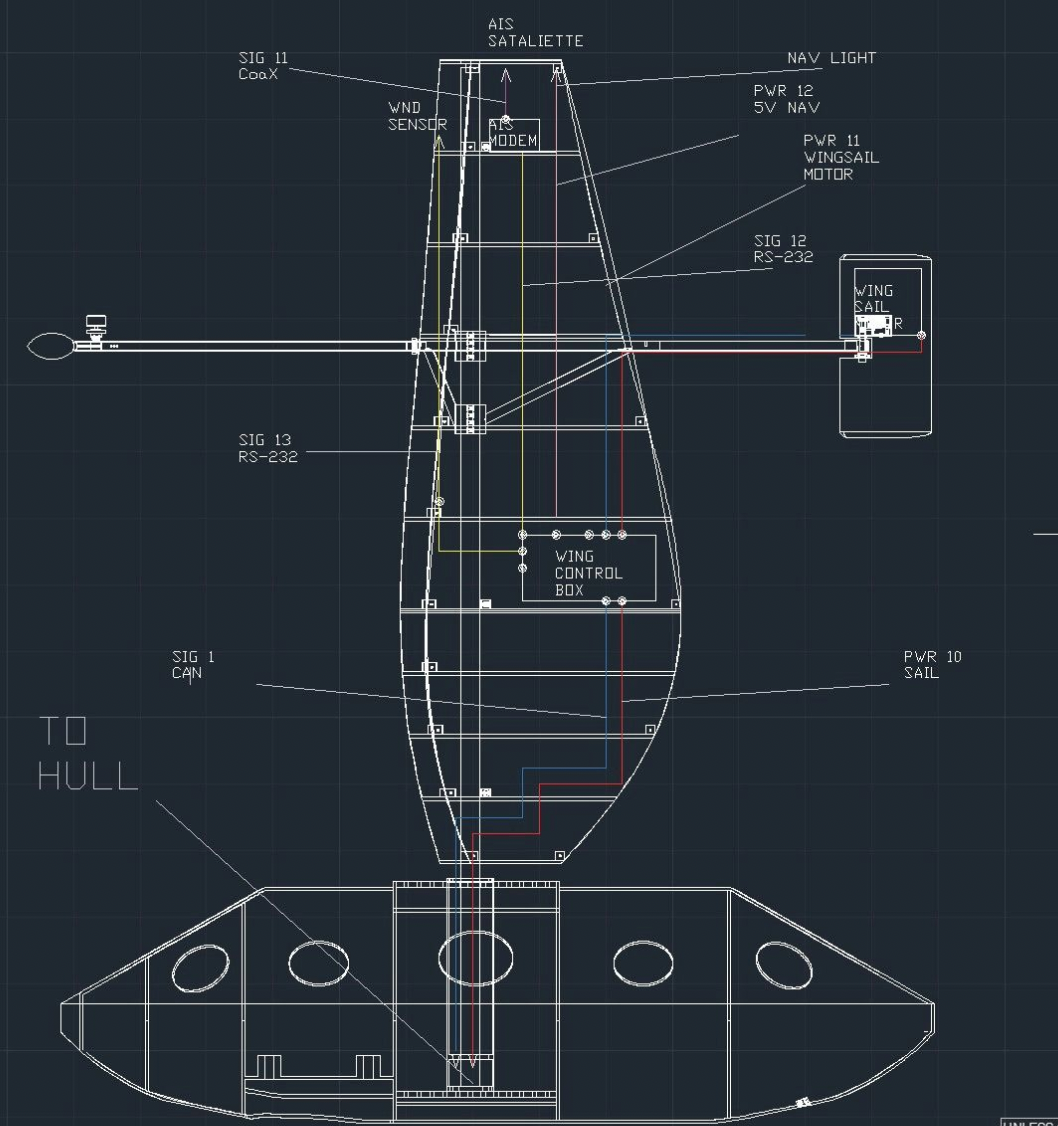
The wingsail captures and redirects wind energy to generate lift, which propels the boat forward. The wingsail’s design allows for better control, stability, and performance, especially in varying wind conditions.
-
The rudder is located at the stern, used to steer the boat by altering its direction. The rudder is controlled by an onboard system, which adjusts its angle based on inputs from sensors and navigational algorithms.
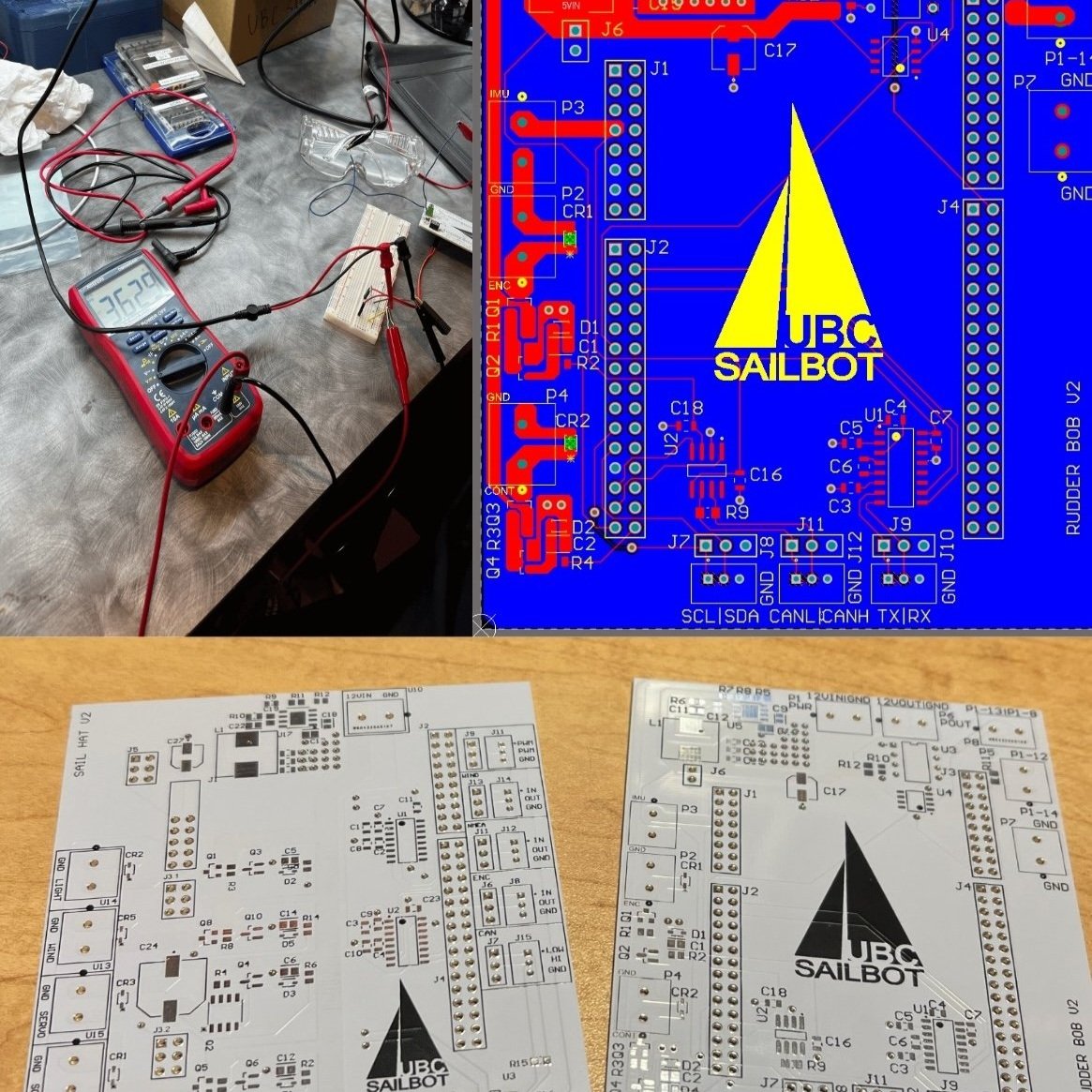
Electrical

-
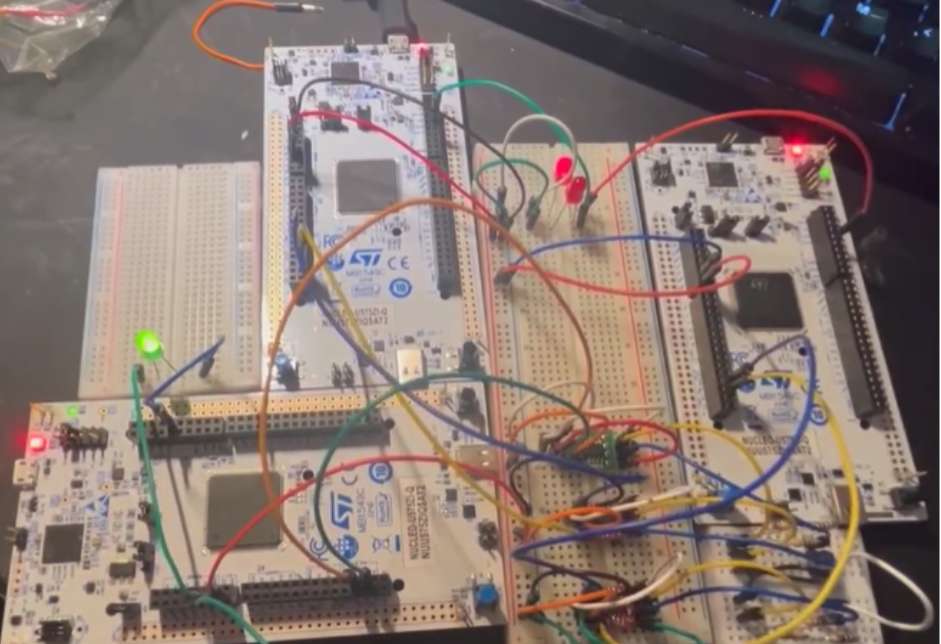
Robust communication network to transmit data, commands and errors. Includes design of the boat’s main computer (in collaboration with the Software team) where commands are sent and data is received.
-
Control models to manage the physical interface of the boat in generating propulsion and control for navigation. Includes design, assembly and testing of hardware/firmware that controls the rudder and sail.
-
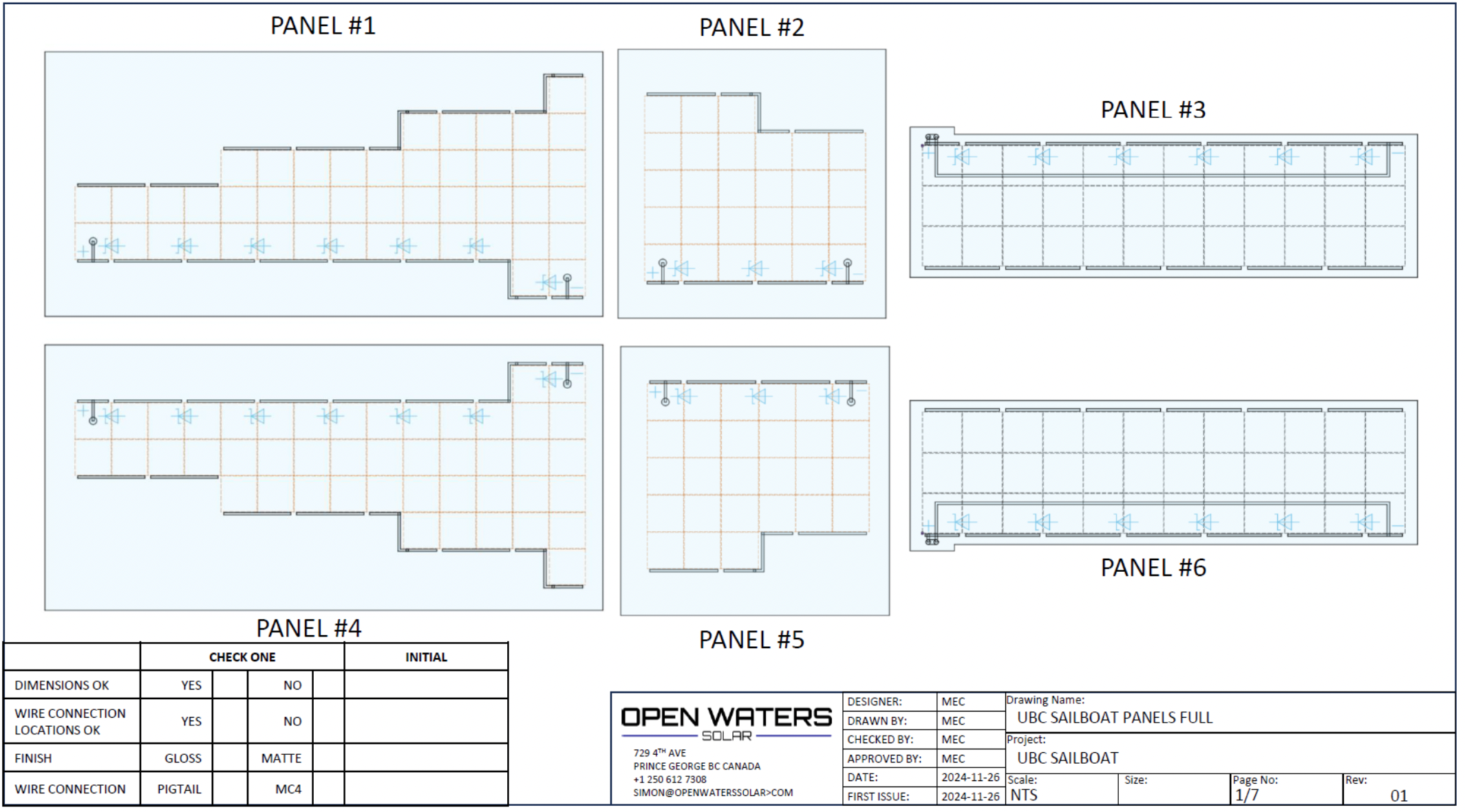
Reliable power system that efficiently distributes power throughout the boat. Since power is a finite resource, it must be carefully allocated to each device, which is managed through a power budget.
Software




-
The pathfinding system is broken down into global and local pathfinding modules. The global pathfinding module stores waypoints from the starting position to the final destination. These waypoints are 15 km apart, while the waypoints will be less than 5 km for the local pathfinding.
-
The Network Systems include a messaging system that ensures Pathfinding receives the information that it needs to make navigation decisions. This information comes from electrical modules such as the onboard GPS, AIS, satellite communication system, and many more.
-
The simulator allows the team to verify coordination between the sail controller, pathfinding algorithms, and network systems without the physical boat. It simulates wind and water dynamics using multivariate Gaussian generators and Taylor approximation to estimate the boat's future acceleration, velocity, and position based on fluid forces.